Naissance de l'automate :
Dès l'Antiquité, on signale plusieurs automates bio-inspirés, dont le pigeon volant d'Archytas de Tarente ou les fameuses scènes théâtrales animées de Héron d'Alexandrie.
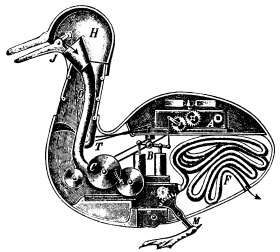
Au XVIIIe siècle (considéré comme l'âge d'or des automates), le célèbre canard de Jacques de Vaucanson, aujourd'hui perdu, qui pouvait boire, se nourrir, caqueter, s'ébrouer dans l'eau, digérer sa nourriture et même... déféquer, a ébloui par sa complexité les spectateurs de l'époque.
Naissance du mot robot :
L’auteur de la pièce, l’écrivain tchèque Karel Capek, avait d’abord songé à les nommer «labori», à partir du mot latin «labor» (travail). Mais son frère, Josef, lui a proposé de reprendre le terme tchèque «robota», qui signifie «corvée».Ce terme est en effet tiré d’une pièce de théâtre (R. U. R Rossum’s Universal Robots) jouée à Prague en 1921.

Les 3 lois de la robotique d'Isaac Asimov :
Les trois lois de la robotique ont été imaginées par l'auteur américain d'origine russe Isaac Asimov alors qu'il écrivait des nouvelles pour le magazine Astounding Science Fiction, dirigé par John Campbell. Isaac Asimov est certainement l'un des auteurs de science-fiction parmi les plus connus au monde.
En voici la formulation originale :
- loi numéro 1 : un robot ne peut porter atteinte à un être humain ni, restant passif, permettre qu'un être humain soit exposé au danger ;
- loi numéro 2 : un robot doit obéir aux ordres que lui donne un être humain, sauf si de tels ordres entrent en conflit avec la première loi ;
- loi numéro 3 : un robot doit protéger son existence tant que cette protection n'entre pas en conflit avec la première ou la deuxième loi.

Naissance de la robotique :
La robotique est l'ensemble des techniques permettant la conception et la réalisation de machines automatiques ou de robots.
L'ATILF définit le robot de la manière suivante : « Appareil effectuant, grâce à un système de commande automatique à base de micro-processeur, une tâche précise pour laquelle il a été conçu dans le domaine industriel, scientifique, militaire ou domestique »1.
De cette définition découlent deux interprétations : la première serait de voir le robot comme une machine, qui possède des capteurs, un système logique et des actionneurs. Il est matériel. La deuxième laisse penser qu'un robot peut aussi être virtuel (voir Bot informatique).

Premier robot industrielle :
Unimate est le premier robot industriel. Il est en fait un
descendant direct des télémanipulateurs développés pour les besoins du
nucléaire. Il est vendu à partir de 1961 par la société américaine Unimation,
créé par George Devol, l'un des pionniers de la robotique universelle. Il est
utilisé pour la première fois sur les lignes d'assemblage de General Motors.

Un robot utilisé en médecine :
Début 2010, il n'existait pas de concurrent au robot Da
Vinci. C’est un robot médical et plus précisément une machine dirigée par un
chirurgien pour réaliser des opérations, principalement au niveau de l'abdomen.
Il est vendu par l'entreprise américaine Intuitive Surgical. En avril 2011,
elle indiquait que 1 750 exemplaires étaient en service dans le monde.

Un robot utilisé dans l'espace:
Lunokhod 1 est le premier des deux rovers (astromobiles) envoyés sur la Lune par l'Union soviétique dans le cadre du programme Lunokhod. Le vaisseau qui a transporté Lunokhod 1 s'appelait Luna 17. Lunokhod a été le premier robot téléguidé depuis la Terre à se poser sur un sol extra-terrestre et a parcouru plusieurs dizaines de kilomètres durant plusieurs mois en effectuant des relevés scientifiques et en transmettant des dizaines de milliers de photos.

Un robot humanoïde :
ASIMO (pour Advanced Step in Innovative MObility, « Étape
avancée dans la mobilité innovante » en français que l'on peut traduire
par « des jambes aussi ») est un robot humanoïde développé par la firme
japonaise Honda Motor et introduit au Robot Hall of Fame de Pittsburgh en 2000
comme étant le premier robot humanoïde capable de marcher de façon dynamique.
ASIMO est un robot de recherche ; il n'est donc pas
commercialisé. Néanmoins, il a déjà été prêté pour quelques événements publics.
Il a aussi été loué par de grandes entreprises comme IBM, afin de remplir la
tâche d’hôte d’accueil. En février 2009, il existait plus de 100 robots ASIMO,
dans plusieurs versions différentes. À terme, les robots ASIMO devront pouvoir venir en aide aux
personnes handicapées, âgées ou malades. Ils pourront aussi effectuer des
tâches dangereuses pour les humains.

Un robot dans le bâtiments et travaux publics :
L’exosquelette développé par RB3D et Colas permet aux compagnons de limiter les efforts physiques répétitifs et de préserver leur capital santé tout au long de leur carrière. Grâce à cet outil facile à prendre en main, les collaborateurs peuvent ainsi pousser et tirer jusqu’à 50 kilos grâce à des technologies issues du domaine de la robotique : un manche détecte l'intention de l'utilisateur et amplifie son geste, une jambe reporte les efforts aux sols pour améliorer la posture et le confort de l'utilisateur...

Un robot dans l’agriculture :
Combiner développement durable et productivité n’est pas évident. Le monde agricole en sait quelque chose. Pointés du doigt pour leur utilisation de produits phytosanitaires nocifs, les agriculteurs sont amenés à s’équiper de nouveaux outils pour en réduire les volumes sans perdre en rendement. Les objets connectés et les robots occupent une place de choix dans la ferme de demain. Drones pour l’épandage ou la cartographie, capteurs pour identifier la période d’accouplement des bêtes, préparateur de nourriture… les solutions se multiplient pour améliorer la qualité de la production. Naïo Technologies, une jeune entreprise toulousaine spécialisée dans la conception de robots agricoles a mis au point Dino, un véhicule de désherbage mécanique enjambeur.




Aucun commentaire:
Enregistrer un commentaire